Jack Parker-Holder
Excerpt
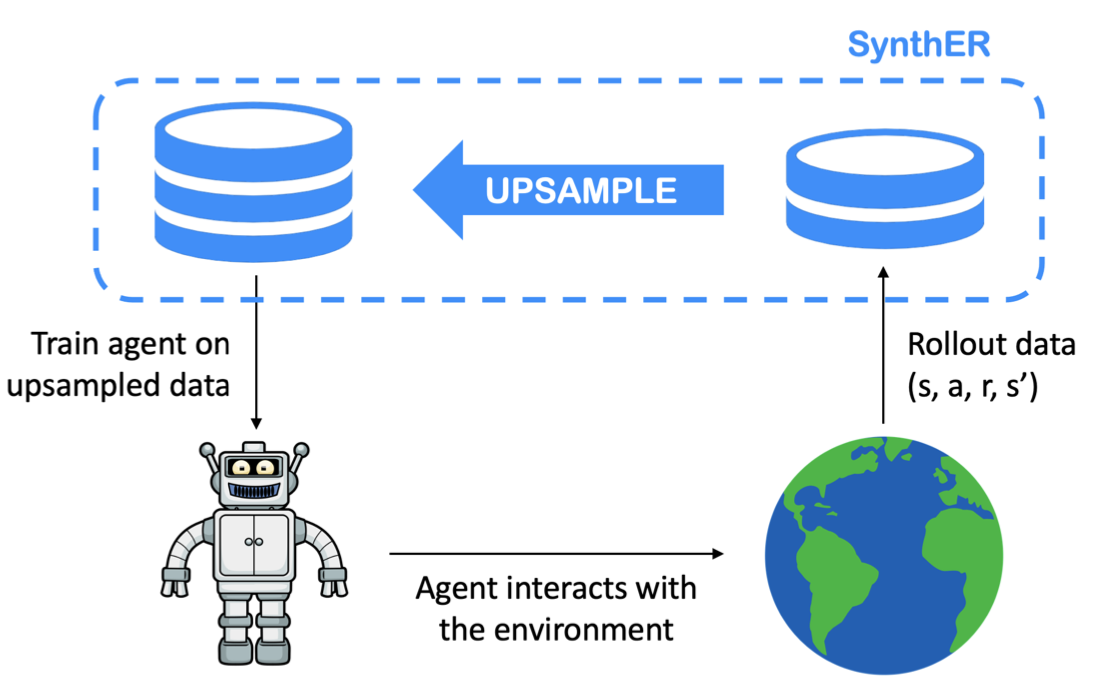
| Synthetic experience replay |
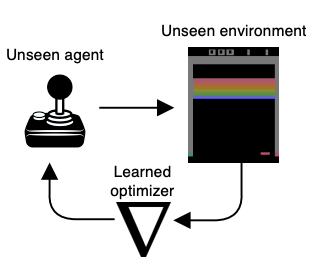
| Discovering General Reinforcement Learning Algorithms with Adversarial Environment Design |
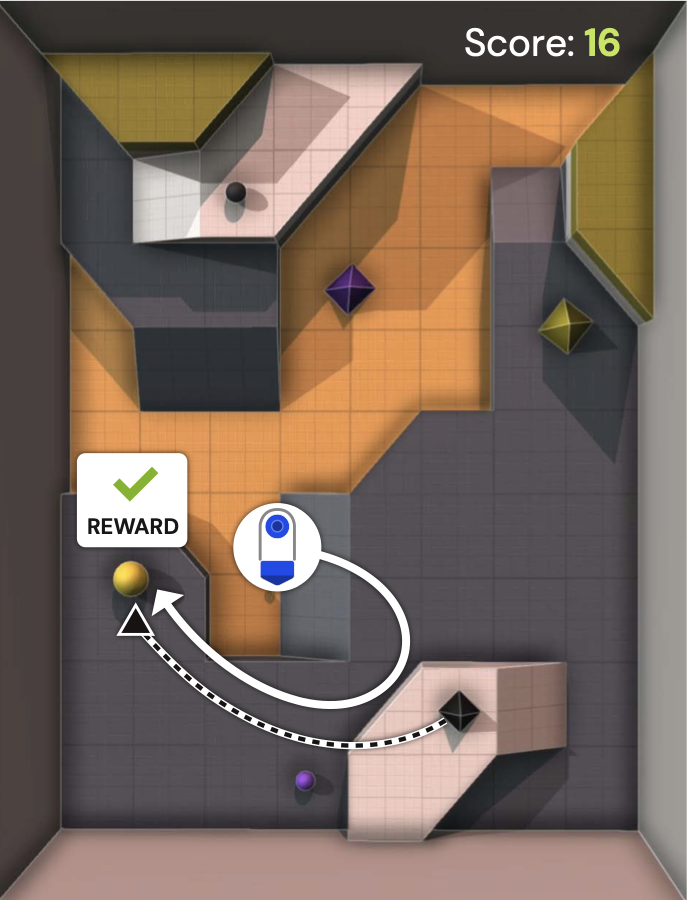
| Human-Timescale Adaptation in an Open-Ended Task Space |
| MAESTRO: Open-ended environment design for multi-agent reinforcement learning |
| Learning Genneral World Models in a Handful of Reward Free Deployments |
| Evolving Curricula with Regret-Based Environment Design |

| From block-Toeplitz matrices to differential equations on graphs: towards a general theory for scalable masked Transformers |
| Revisiting Design Choices in Offline Model Based Reinforcement Learning |
| Towards an Understanding of Default Policies in Multitask Policy Optimization |
| On-the-fly Strategy Adaptation for ad-hoc Agent Coordination |
| Lyapunov Exponents for Diversity in Differentiable Games |
| Same State, Different Task: Continual Reinforcement Learning without Interference |
| Tuning Mixed Input Hyperparameters on the Fly for Efficient Population Based AutoRL |
| Replay-Guided Adversarial Environment Design |
| Tactical Optimism and Pessimism for Deep Reinforcement Learning |
| MiniHack the Planet: A Sandbox for Open-Ended Reinforcement Learning Research |

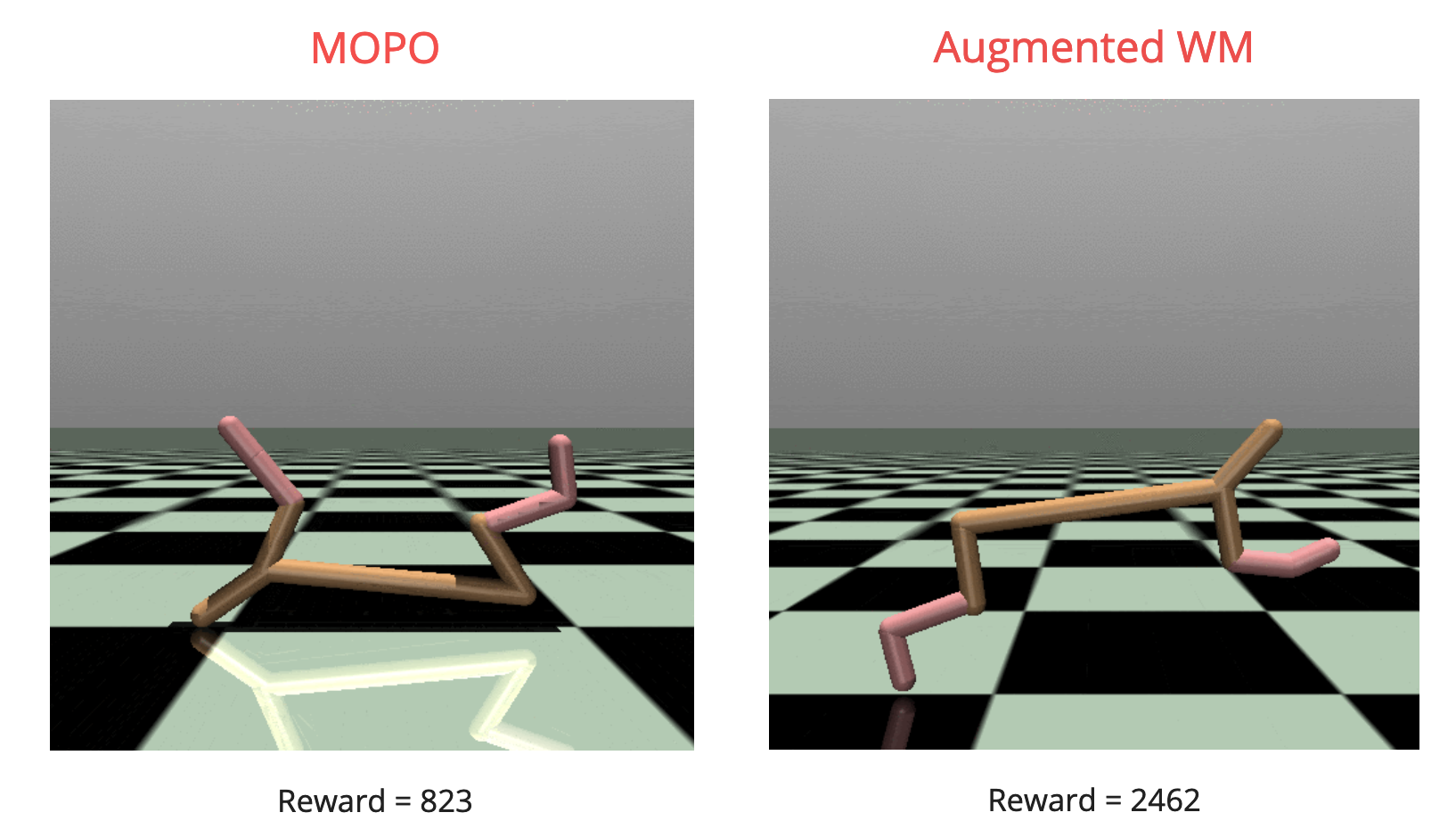
| Augmented World Models Facilitate Zero-Shot Dynamics Generalization From a Single Offline Environment |
| Towards Tractable Optimism in Model-Based Reinforcement Learning |
| Effective Diversity in Population-Based Reinforcement Learning |
| Provably Efficient Online Hyperparameter Optimization with Population-Based Bandits |
| Ridge Rider: Finding diverse solutions by following eigenvectors of the Hessian |

| Ready Policy One: World Building Through Active Learning |
| Learning to Score Behaviors for Guided Policy Optimization |
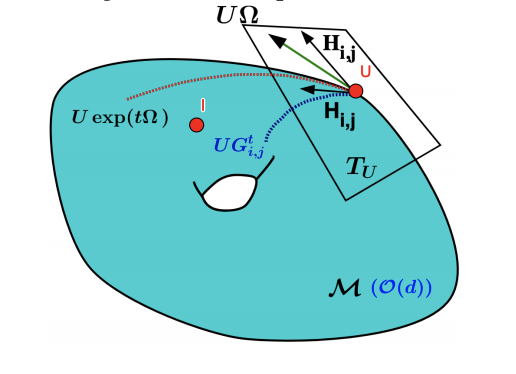
| Stochastic Flows and Geometric Optimization on the Orthogonal Group |
|
|
| From Complexity to Simplicity: Adaptive ES-Active Subspaces for Blackbox Optimization |
| Provably Robust Blackbox Optimization for Reinforcement Learning |